式AGV")
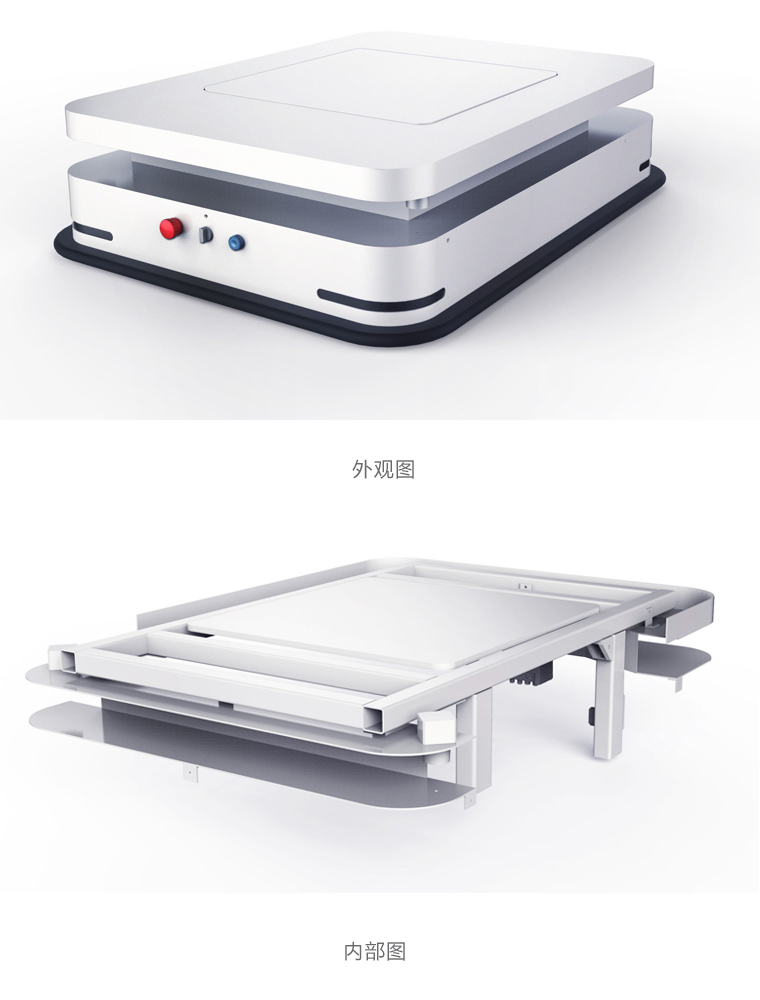
全向背負(fù)式AGV
激光無(wú)軌AGV是面向服務(wù)機(jī)器人,、工業(yè)室內(nèi)巡檢推出的自主移動(dòng)平臺(tái),使用自然導(dǎo)航技術(shù),,無(wú)需在使用場(chǎng)景中部署磁條/磁釘?shù)仍O(shè)施,,即可實(shí)現(xiàn)平臺(tái)的自主移動(dòng)
配合我司的任務(wù)部署及調(diào)度系統(tǒng)CAFM系統(tǒng)軟件使用,,可完成現(xiàn)場(chǎng)環(huán)境學(xué)習(xí)及任務(wù)快速部署
同時(shí)激光無(wú)軌AGV提供了面向系統(tǒng)集成及開(kāi)發(fā)者的軟硬件二次開(kāi)發(fā)接口,,可以實(shí)現(xiàn)基于AGV平臺(tái)的應(yīng)用開(kāi)發(fā)
|
外形尺寸 |
1.2米x0.9米x0.33米(長(zhǎng)x寬x高)可定制 |
|
導(dǎo)航方式 |
激光導(dǎo)航 |
|
控制方式 |
集中調(diào)度 |
|
走行方式 |
前進(jìn)后退,,左右轉(zhuǎn)彎 |
|
通訊方式 |
無(wú)線局域網(wǎng) |
|
運(yùn)載重量 |
200KG/500KG(可定制) |
|
安全防護(hù) |
障礙物傳感器+防撞機(jī)構(gòu)雙重防護(hù) |
|
走行速度 |
0-35m/min |
|
導(dǎo)航精度 |
±10mm |
|
爬坡能力 |
≤3° |
|
停車精度 |
±10mm |
|
充電方式 |
手動(dòng)充電/自動(dòng)充電 |
|
驅(qū)動(dòng)方式 |
差速驅(qū)動(dòng) |
|
驅(qū)動(dòng)電壓 |
DC24V/DC48V |
|
報(bào)警方式 |
聲光報(bào)警 |
|
安全感知距離 |
0~3米,,可調(diào) |
|
車體使用壽命 |
≥10年 |
設(shè)備特性:
1,、激光無(wú)軌AGV是面向服務(wù)機(jī)器人,、工業(yè)室內(nèi)巡檢推出的自主移動(dòng)平臺(tái),使用自然導(dǎo)航技術(shù),,無(wú)需在使用場(chǎng)景中部署磁條/磁釘?shù)仍O(shè)施,,即可實(shí)現(xiàn)平臺(tái)的自主移動(dòng)。
2,、配合我司的任務(wù)部署及調(diào)度系統(tǒng)CAFM系統(tǒng)軟件使用,,可完成現(xiàn)場(chǎng)環(huán)境學(xué)習(xí)及任務(wù)快速部署,。
3、同時(shí)激光無(wú)軌AGV提供了面向系統(tǒng)集成及開(kāi)發(fā)者的軟硬件二次開(kāi)發(fā)接口,,可以實(shí)現(xiàn)基于AGV平臺(tái)的應(yīng)用開(kāi)發(fā),。